
November Blog
This blog covers our progress throughout November. It starts off with the changes we made to the aluminum ROV, the tether, the video stream, and finally covers our first ocean test.

After the November pool test, we realized that we needed to make changes to the ROV chassis. To address the pitching in the previous test, we decided to relocate the thrusters. Since we didn't know exactly where to put the thrusters, we printed out new side plates that had different thruster mounting hole spots. We also moved the mounting holes for the lights forward in order to prevent the side plate from shedding a portion of the light. Hopefully, this gives us a better field of view underwater. To the right, you can find a picture that compares the two versions of the side plate. The new one is in blue.

We also made some changes to the tube mounts profile. Our new tube mount has a larger slot for the tube. This makes it much easier to position the tube in the correct position. As we are no longer mounting the thrusters inside of the ROV, we were able to change the shape of the piece that connects the tube mount to the side plates. We ended up making this piece thicker and more circular. Since we changed the overall profile of the tube mount, we also had to change the tube clamp. The new tube clamp is a bit smaller than the old one and has a thicker piece of tape that goes between the tube and clamp when it is fastened. We need this piece of tape to create friction and compress the gap between both parts. This prevents the tube from sliding or turning.
After we finished making changes to the ROV’s chassis, we went to the pool to test the buoyancy. At this point in time, the ROV weighed thirteen pounds. When placed into the pool, it floated. After adding two 140 gram weights to each side, the ROV began to sink. After testing with smaller weights, we found that we needed a total of 360 grams of weight to be neutrally buoyant in the pool. This translates to a positive buoyancy in the Ala Wai or Ocean because salt water has a higher density than freshwater.

In the first half of the month, we also finished putting together the tether spool mount and soldered the connector onto the tether. The assembly of the mount was not too difficult, but spooling the tether was a different story. The tether we have is 200 meters long, and it was pretty tangled so we had to untangle it and then spool it on. After it was put onto the spool, we reattached one side to the end cap and another to the computer. The tether is fastened to the computer by an additional box with a Fathom inside. Using this box is more practical because it does not expose the Fathom to the outside. Instead of an Ethernet connection to the computer, this blue box connects to the computer via USB.
While working on the tether spool, we worked on setting up a stream. The first step to showcase our ROV and camera feed in a classroom is to set up a way to live stream the feed. We did this by first setting up OBS, which is a streaming app, and set the capture screen to QGroundControl.

Then we created a Twitch account called Operation_NEMO. We decided on Twitch because it’s one of the most favored streaming platforms and is often paired with OBS.
After that was setup, we embedded the stream onto our blog. Although none of us were very familiar with HTML, there were a lot of resources available online that allowed us to embed the stream like shown.

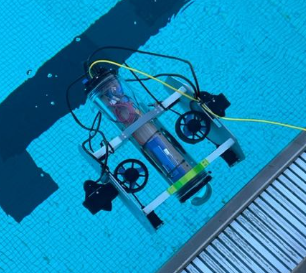
Before Thanksgiving, we went to Kewalo Basin Harbor to test the ROV in the ocean. The picture to the right showcases the version of the ROV that we used in this test.
As stated previously, the ROV was positively buoyant in the ocean. It was also very hard to control because it pitched in all directions. The first thing we did was try to get the ROV to sink by making it negatively buoyant. We adjusted the buoyancy by adding, removing, and repositioning weights along the ROV. We also moved the tube back and forth in order to correct the center of gravity. Even though we made these adjustments, the ROV was still hard to control and continued to pitch vertically.
While the ROV was hard to control, it was good to see that the tube did not leak and the tether spool functioned properly. We also recorded and live streamed this test to our Twitch channel and saved data from the test to an SD card.

We learned a lot from this test and have many improvements to make before our next test. Going into December, our number one priority is to fix the pitching in order to make the ROV more drivable.