
December Blog
Following our test at the beach last month, we did further research on improving the ROV’s driving maneuverability. An important thing to note is that the stabilize and depth modes do not correct pitching; these modes are meant to correct the roll. To minimize pitching, we moved the thrusters to the same plane as the ROV’s center of gravity.
We made a variety of changes to the chassis to allow us to move the thrusters around easier. To provide more options for mounting the thrusters, we made new side plates with a tessellated hole pattern. The area inside the ROV did not allow the vertical thrusters to move around very much because of the 3D-printed tube mounts. To make room, we eliminated the thick 3D-printed part that stretched across the top to each of the side plates and replaced these with metal churros. We used a chop saw to cut the rods to fit in between the side plates, and then used the lathe to tap the holes needed to connect the tops of the side plates. These churros prevent the side plates from flexing at the top.
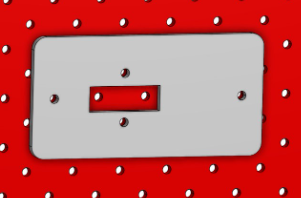
Our results from the beach test made it clear that the submarine pitched a lot when the thrusters were running. To fix this, we moved the thrusters to the same plane as the center of gravity. We took the thrusters off and balanced the ROV on a PVC pipe across the bottom, as well as the side. After marking the side plates with where the ROV was balanced on the PVC pipe, we found the point where the lines intersected and mounted the thrusters centered on the point. However, we could not mount the vertical and horizontal thrusters on this common point at different sides of the plates because the mounting holes interfered with each other. For the pool test on the fifteenth, we made a temporary plate out of wood (shown in gray). The horizontal thrusters mounted onto the aluminum side plate (shown in red) with screws that fit through the rectangle hole. The vertical thrusters were mounted to the two holes on the top and bottom of the rectangle, and the wooden plate was fastened onto the side plate by the two outer holes. Instead of wood, we will cut this plate out of acrylic in the future.

In addition to these adjustments, we made minor changes to the ROV as well. The camera feed was picking up interference from the rim of the tube dome, so we extended the mount for the camera. After this change, the rim is no longer visible on the stream.

We also 3D printed a thimble to provide strain relief to the tether. The tether fits into the slot that wraps around the thimble and is zip tied together after.

Before we departed for winter break, we ended the month with a pool test on the fifteenth. During this test, we used the artificial horizon provided by qGroundControl to determine that the ROV was level in the water with four weights on the bottom front bar, a pool noodle running across the back churro and an inch of pool noodle on the front churro. When running the thrusters at 25% power, going full throttle forwards pitched up less than 5°, while going full throttle backwards and down pitched down about 5° and full throttle up pitched up about 5°. These were really good results for keeping the ROV level while driving, and it was clear that moving the thrusters to the same plane as the center of gravity helped a bit. It would be good to be able to obtain the same results with the thrusters running at 50%. Currently, the ROV pitched up 10° when going full throttle forwards, full throttle down pitched down 25°, and full throttle up pitched up a little less than 10°. The ROV was also slightly negative buoyant during these tests, but as it descended in the water it sank quicker because the pool noodles were decreasing in volume and thus less buoyant force was acting on the ROV. To address this, we will use a buoyancy foam that will not change size as easily when under different amounts of pressure.We also tested the depth hold mode, but the ROV immediately dove to the pool floor upon activation. For the future, we would like to continue fine tuning the pitch, obtaining different foam, and debugging the depth hold mode.